Диаметр робота, приблизительно, три миллиметра. Она находится под управлением внешнего магнитного поля.
Учёные создали миниатюрную робомедузу. Изобретение способно плавать, взмахивая лопастями. Оно может захватить лёгкие предметы. Помимо того для него не составит затруднения вырыть углубление на дне.
Электроника миниатюризируется всё дальше. Однако, те, кто разрабатывают роботов небольших размеров, всё ещё остаются ограниченными в своих возможностях.
Наибольшая трудность заключается в том, как в миниатюрного робота вставить автономную систему питания и чтобы она, при этом, могла управлять движением.
Чтобы избежать этого, учёные нередко прибегают к созданию пассивных конструкций, управление которыми полностью осуществляют внешние стимулы.
Магнитное поле применяется для этого уже не первый раз. Оно же и источник команд. Оно же – и движущая сила. Проблема в том, что возможности таких миниатюрных роботов были до сих пор весьма ограниченными.
Сейчас в результате труда учёных создан новый пассивный робот. Он уже способен к плаванию в жидкостях и к перемещению предметов.
Авторы положили в принцип его движения тот, которым пользуются медузы.
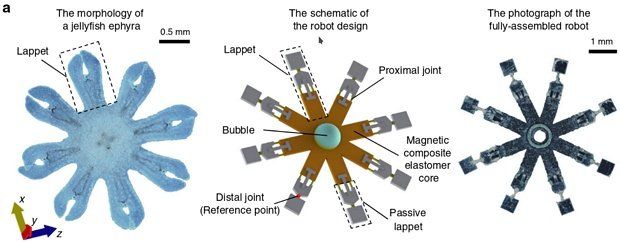
Когда они находятся в состоянии личинок, то имеют форму звезды, у которой есть восемь лопастей.
Робомедузу также оснастили восьмиконечной центральной частью. К ней присоединяются намагниченные конечности, лопасти которых пассивны.
Материалом для центральной части послужил силиконовый эластомер, куда включили пятимикрометровые ферромагнитные частицы из бора, железа и неодима.
Для того, чтобы робот получил неравномерную намагниченность, учёные воспользовались своеобразным методом. В центре силиконовой части помещалась капля, которую после этого обволакивали конечности.
После этого капля замораживалась, и частицы проходили намагничивание во внешнем поле. Затем происходило размораживание капли, и полимер вновь распрямлялся.
Последний этап состоял в том, что эти конечности получали немагнитные полимерные лопасти. Нейтральную плавучесть роботу придавали воздушным пузырём, установленным в центре.
То, что центральная полимерная секция намагничивалась, находясь в изогнутом состоянии, позволяет изгибать её с помощью магнитного поля различной направленности.
Робот при этом, как и личинка медузы, начинает шевелить своими лопастями для продвижения вперёд. Созданная конструкция способна к расчистке дна путём уборки с него мелких частиц. Лёгкие частицы он может поднять на поверхность.
Помимо того, робот может быть вполне пригоден для того, чтобы смешивать различные жидкости.







