Сотрудниками Швейцарского технологического федерального института, занимающимися созданием «умных» роботов был представлен робот серии ANYmal передвигающийся на четырех конечностях.
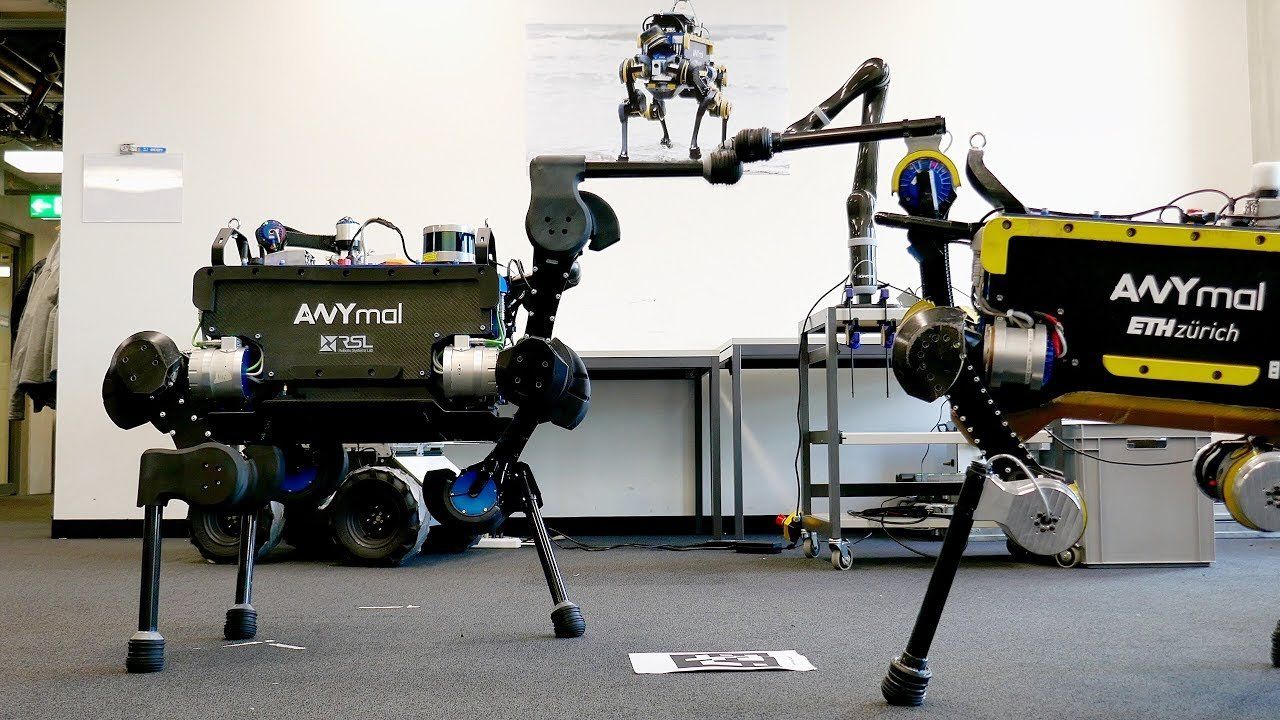
Новая модель является усовершенствованной и модифицированной версией старой версии техники, благодаря чему была увеличена скорость передвижения машины, а также увеличена ее устойчивость, даже при значительно воздействии из вне.
Данные серии роботов преподносятся в качестве конкурентов желтых роботизированных систем, перемещающихся также с помощью четырех конечностей серии Spot, что производится компанией Boston Dynamics. Данные роботы должны будут выполнять работу помощников в различных сферах деятельности, например, для участия в спасательных операциях при обвалах, для работы в канализационных системах, оказании помощи при переноске раненых и доставке припасов во время военных операций, а также могут быть полезны при переносе грузов в складских помещениях.

Первый рабочий прототип такого робота был приспособлен для передвижения по пересеченной местности и оказался незаменимым высокотехнологичным устройством при использовании его в спасательных операциях, где участие человека было невозможным, затруднительным или крайне опасным. Робот, оснащен также встроенной камерой, позволяющей операторам следить удаленно за его перемещениями в реальном времени.
В новой презентуемой модели базовый функционал остался на месте, но характеристики были значительно повышены. Так в ходе испытаний прототипа был побит рекорд скорости передвижения подобных роботов. Скорость новой модели превышала показатели предыдущих на четверть. Среди модификаций числится и увеличения устойчивости аппарата, а также улучшение реакции на усилие, примененное к нему, чтобы свалить ANYmal. Даже при удачном сбивании с ног робота, что само по себе является нелегкой задачей, он способен занять изначальную позицию из любого положения. По явилась возможность реализации данного поведения четвероного робота благодаря сложной системе сенсоров, которая позволяет определять точки опоры и свое расположение в пространстве.
Швейцарский федеральный технический институт работает над запуском своих творений в полевые условия, чтобы выявить их недостатки, которые следует доработать и определить достоинства, которые уже можно будет применять на практике. Для тестового полигона была выбрана местная городская канализация, в которой сотрудники института будут обнаруживать и устранять неполадки в работе канализационной системы.
Новые модели в настоящее время тестируются на способность ориентации в пространстве, дабы избежать потери устройств при удаленных работах. Чтобы не допустить потерю и повреждение дорогостоящей техники она была оборудована камерой, позволяющую вести съемку и наблюдение в высоком разрешении, а также данный класс роботизированных устройств оснащен радарами и лидарами, помогающими им следовать заданным маршрутом и возвращаться обратно.